Research
Point Cloud Motion Forecasting via Graph‑based Machine Learning
We propose a graph-based neural network architecture that, given a point cloud sequence, can make accurate predictions of future frames.
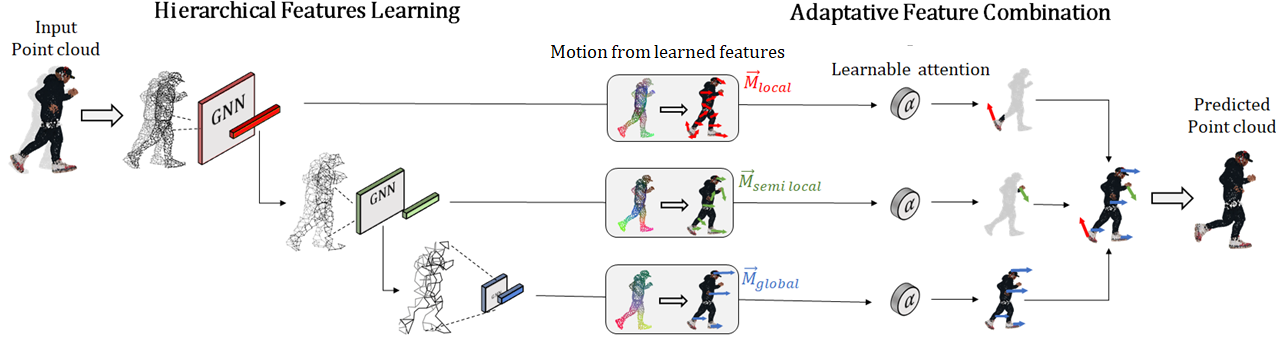
We develop the following contributions:
- A graph-based module that exploits the point cloud geometric structure to form spatio- temporal neighbourhoods from where the meaningful dynamic features can be extracted. The structural information is further included in the learned dynamic features, reducing the deformation of the predicted point cloud shape;
- A novel module that combines hierarchical features in an adaptative manner according to the scene context. The proposed module dynamically controls the composition of local and global motions for each point, allowing the network to predict complex motions with higher accuracy and flexibility .
‘Opening the Black-Box’ - GNNs Explanability
We developed a technique for feature disentanglement and feature visualization.
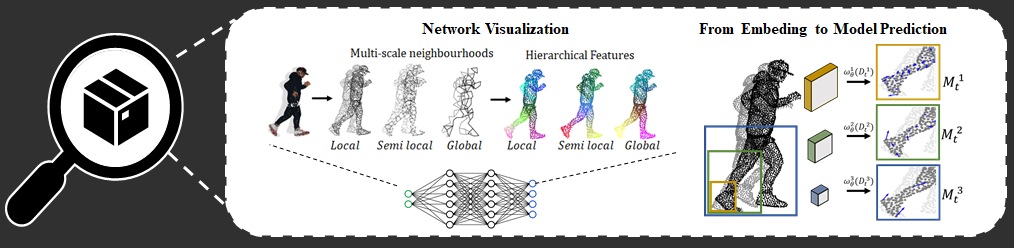
Using this technique, we explained hierarchical features in the context of dynamic point cloud processing. We have shown
- The interpretation learned features of low- and high-level features as local and global motions;
- The importance of different network components (#nr of layer, parallelism) in current state-of-the-art point cloud processing models.
Millimeter-Wave Radar Processing via GNNs
We investigated denoising point cloud generated by millimeter-wave (mmWave) radar sensor.
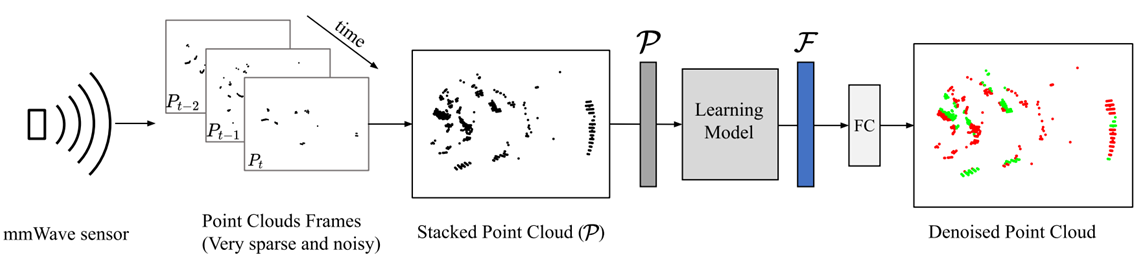
Millimeter-wave sensors produce point clouds that are much sparser and noisier than other point cloud data (e.g., LiDAR), yet they are more robust in challenging conditions such as in the presence of fog, dust, smoke, or rain. Our goal is denoising this data
Our contributions are the following
- The frist dataset of indoor point clouds aquired by Millimeter-wave Radar in literature
- Implementation of SotA aproaches for this dataset and their limitations
- A novel graph-based architecture desinged ot adress the specific challegnes of mmilimeter-wave data
Light Field Image Compression
Light Field images are a rich representation of the 3D scene. Due to their large size, Light Field images require efficient compression algorithms.
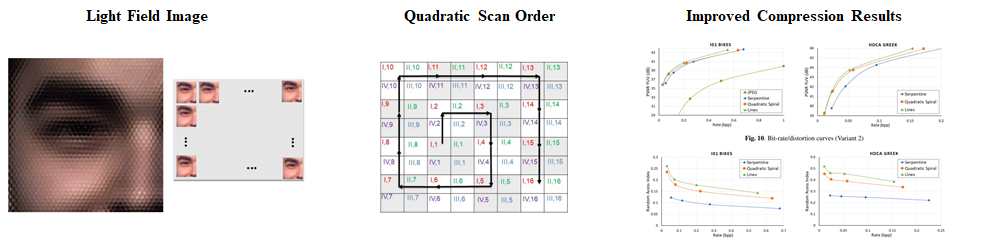
We proposed an efficient, scalable light field image coding method.
Our methods create a ‘pseudo-video’ sequence from the image using a novel Quadratic Scan Order of our design. The video is then encoded using (HEVC) encoders. Besides superior compression results, our methods has improved random access functionalities.
Eimeria Vaccine Development and Protein Modelling London, UK
Parasite-host dynamics can be modeled using graph-representations.
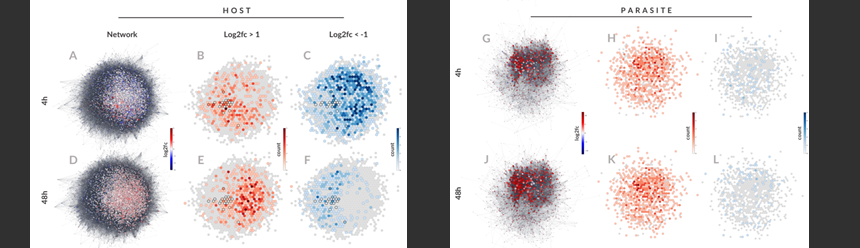
- I used graph representations of molecules (protein structures) to learn embeddings, which can be used quantify the structural difference between different molecules.